|
Doxygen
1.9.8
Toolkit for Adaptive Stochastic Modeling and Non-Intrusive ApproximatioN: Tasmanian v8.2

|
|
Doxygen
1.9.8
Toolkit for Adaptive Stochastic Modeling and Non-Intrusive ApproximatioN: Tasmanian v8.2
|
Files | |
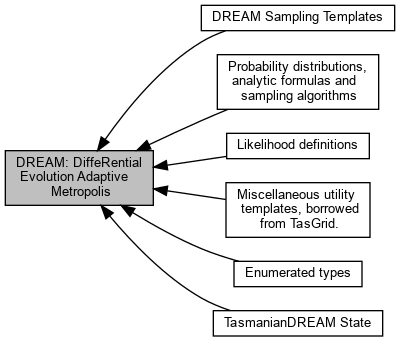
| file | TasmanianDREAM.hpp |
| DiffeRential Evolution Adaptive Metropolis methods. | |
| file | tsgDreamState.hpp |
| The container class holding the DREAM history. | |
| file | tsgDreamSample.hpp |
| Core sampling templates. | |
| file | tsgDreamEnumerates.hpp |
| The enumerated types used in the DREAM module. | |
| file | tsgDreamCoreRandom.hpp |
| Core random sampling methods. | |
| file | tsgDreamCorePDF.hpp |
| Gives the unscaled formulas for several probability distributions. | |
| file | tsgDreamLikelihoodCore.hpp |
| The interface mother-class for the likelihood classes. | |
| file | tsgDreamLikelyGaussian.hpp |
| Several likelihood implementations based on Gaussian noise. | |
Namespaces | |
| namespace | TasDREAM |
| Encapsulates the Tasmanian DREAM module. | |