|
Doxygen
1.9.8
Toolkit for Adaptive Stochastic Modeling and Non-Intrusive ApproximatioN: Tasmanian v8.2

|
|
Doxygen
1.9.8
Toolkit for Adaptive Stochastic Modeling and Non-Intrusive ApproximatioN: Tasmanian v8.2
|
Core sampling templates. More...
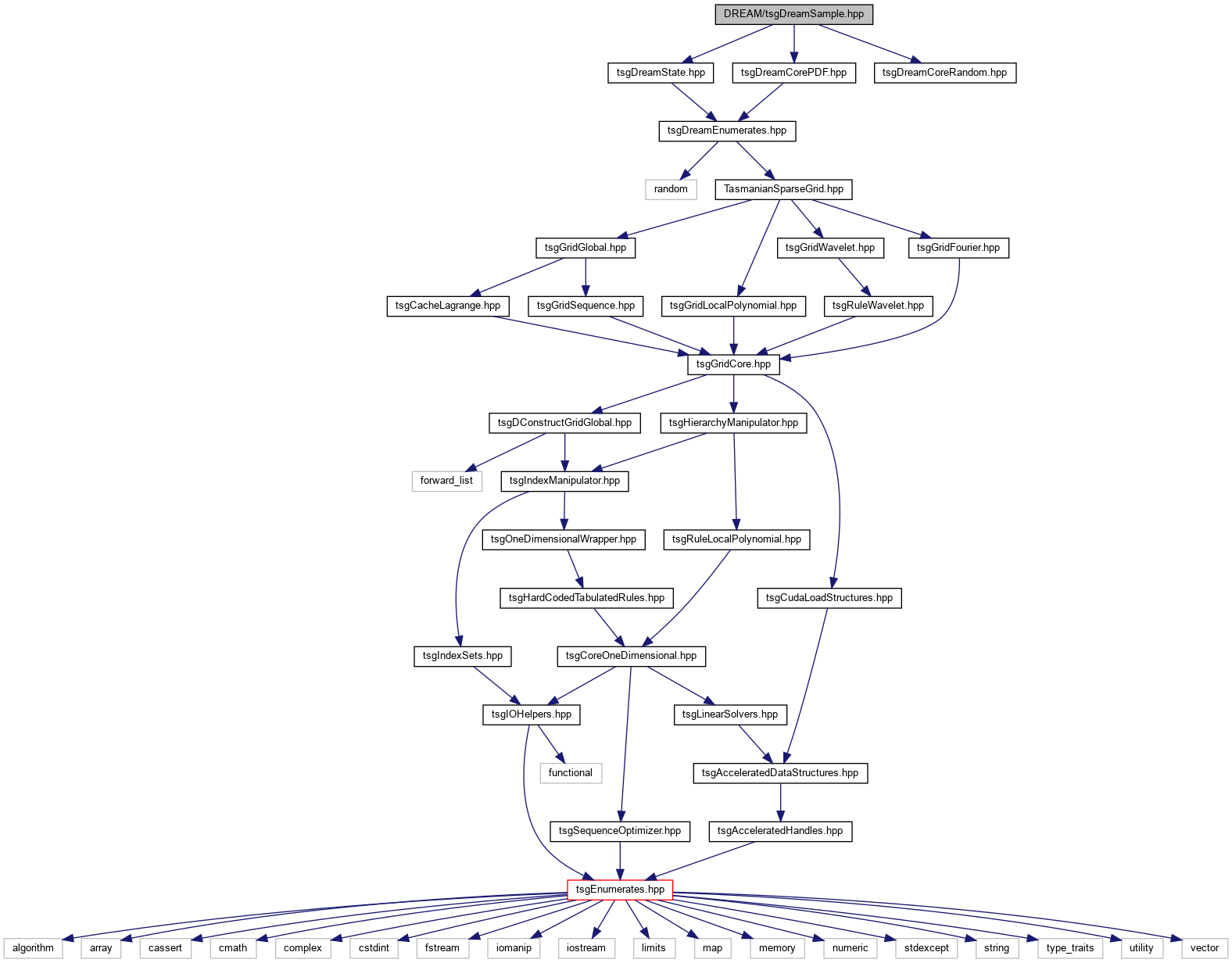
Go to the source code of this file.
Namespaces | |
| namespace | TasDREAM |
| Encapsulates the Tasmanian DREAM module. | |
Typedefs | |
| using | TasDREAM::DreamDomain = std::function< bool(std::vector< double > const &x)> |
| Generic test function whether a sample belongs in the domain. | |
| using | TasDREAM::DreamPDF = std::function< void(const std::vector< double > &candidates, std::vector< double > &values)> |
| Generic probability distribution used by Tasmanian. | |
| using | TasDREAM::DreamModel = std::function< void(const std::vector< double > &candidates, std::vector< double > &outputs)> |
| Generic model signature used by Tasmanian. | |
| using | TasDREAM::DreamLikelihood = std::function< void(TypeSamplingForm form, const std::vector< double > &model_outputs, std::vector< double > &likely)> |
| Generic likelihood signature used by Tasmanian. | |
| using | TasDREAM::DreamPrior = std::function< void(TypeSamplingForm form, const std::vector< double > &candidates, std::vector< double > &values)> |
| Generic signature for the prior distributions used by Tasmanian. | |
| using | TasDREAM::DreamMergedLikelyModel = std::function< void(const std::vector< double > &candidates, std::vector< double > &values)> |
| Generic signature for a combination of a likelihood and a model. | |
Functions | |
| DreamDomain | TasDREAM::hypercube (std::vector< double > const &lower, std::vector< double > const &upper) |
| Make a lambda that matches the inside signature in SampleDREAM(), test if the vector x is in the hyperbube described by lower and upper. | |
| void | TasDREAM::no_update (std::vector< double > &) |
| Dummy function that does not make any changes to the vector as default for the independent_update() in SampleDREAM(). | |
| double | TasDREAM::const_one () |
| Dummy function that returns 1.0, used as default for the differential_update() in SampleDREAM(). | |
| template<int weight_percent> | |
| double | TasDREAM::const_percent () |
| Template that returns a constant based on the percentage, i.e., weight_percent / 100.0. | |
| void | TasDREAM::uniform_prior (TypeSamplingForm, const std::vector< double > &, std::vector< double > &values) |
| Uniform prior distribution for both regular and log form. | |
| template<TypeSamplingForm form = regform> | |
| DreamPDF | TasDREAM::posterior (DreamModel model, DreamLikelihood likelihood, DreamPrior prior) |
| Combines the three components of a Bayesian posterior into a single distribution. | |
| template<TypeSamplingForm form = regform> | |
| DreamPDF | TasDREAM::posterior (DreamMergedLikelyModel likelihood_model, DreamPrior prior) |
| Overload where the model and likelihood are combined into a single call. | |
| template<TypeSamplingForm form = regform> | |
| void | TasDREAM::SampleDREAM (int num_burnup, int num_collect, DreamPDF probability_distribution, DreamDomain inside, TasmanianDREAM &state, std::function< void(std::vector< double > &x)> independent_update=no_update, std::function< double(void)> differential_update=const_one, std::function< double(void)> get_random01=tsgCoreUniform01) |
| Core template for the sampling algorithm. | |
| template<TypeSamplingForm form = regform> | |
| void | TasDREAM::SampleDREAM (int num_burnup, int num_collect, DreamPDF probability_distribution, DreamDomain inside, TasmanianDREAM &state, TypeDistribution dist, double magnitude, std::function< double(void)> differential_update=const_one, std::function< double(void)> get_random01=tsgCoreUniform01) |
| Overload of SampleDREAM() assuming independent update from a list of internally implemented options. | |
Core sampling templates.
Defines the core MCMC template for sampling from an arbitrarily defined unscaled probability density.